
by Virtual Experiences Laboratory (VXLab), RMIT University, Melbourne, Australia
December 2016 — The goal of the “SAGE2 Distributed Point Cloud Viewer” project was to develop a proof-of-concept visualization platform for 3D spatio-temporal data. The primary use case was to support datasets gathered from 3D depth scanners and path analysis tools in a format used by the BeSpaceD spatio-temporal reasoning engine. The viewer, developed as a SAGE2 application, enables display and interaction with data on mobile devices, web clients and, in particular, tiled display walls via the SAGE2 platform, utilizing the public internet and/or academic research networks.
The distributed point cloud viewer was a project by RMIT Information Technology capstone project students through Open Universities Australia (OUA), a distance education program, and supervised by staff from RMIT’s Australia-India Research Centre for Automation Software Engineering. Students deployed a SAGE2 server in the Australian Nectar cloud and demonstrated and evaluated support for multiple geographically distant users in real time, with shared camera positioning and interactive positioning of a resizable box for measuring the physical size of features in the datasets. The viewer was used in conjunction with RMIT’s 40-Megapixel Global Operations Visualization (GOV) Lab in RMIT’s Virtual Experiences Laboratory (VXLab). Ian Peake, VXLab Laboratory Manager and one of the primary organizers of the OUA capstone project, said, “The fact that SAGE2 is open source, based on generic web technologies, and ‘scales down’ to a standard web client is celebrated by us in our regular VXLab demos featuring SAGE2.”
YouTube video: https://youtu.be/om3L9AzNC-M
VXLab, RMIT: http://www.rmit.edu.au/vxlab
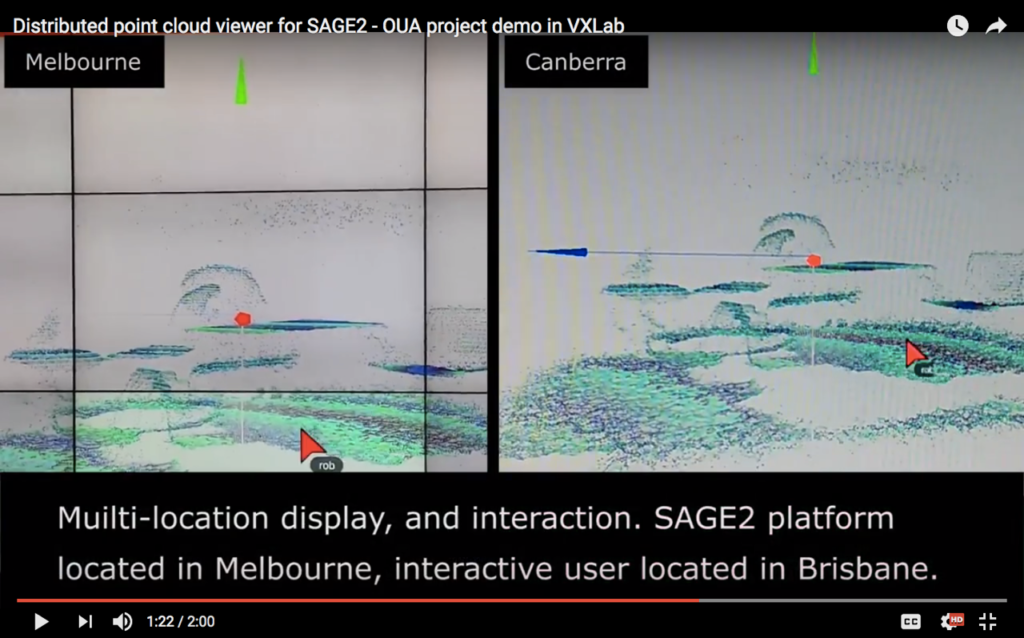
Here is a frame from the RMIT VXLab 2016 video “SAGE2 Distributed Point Cloud Viewer” which shows a user in Brisbane interacting with a SAGE2 platform located in Melbourne, and viewed by users in Melbourne and Canberra.